
在这个项目中;提供 3D 机械手组装、伺服控制、柔性传感器控制、使用 nRF24L01 进行无线控制、Arduino 接收器和发射器源代码。简而言之,在这个项目中,我们将学习如何用无线手套控制机械手。
手和前臂的 3D 模型
这只手是一个名为 InMoov 的开源项目的一部分。这是一个可 3D 打印的机器人,这只是手和前臂的组装。
零件组装
机械臂零件的组装非常详细和复杂,因此您可以访问 InMoov 网站的“组装草图”和“组装帮助”页面,了解更多组装细节。
组装手指时,在粘合之前确保零件的方向正确。在将伺服皮带轮连接到伺服电机之前,请将所有伺服电机保持在 10 或 170 度。安装伺服滑轮时,将手指保持在关闭或打开位置(根据您的伺服角度)。然后缠绕伺服滑轮,直到编织线或绳子被拉伸。
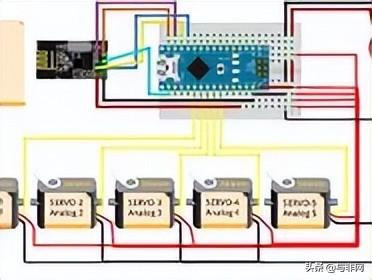
手的连接(接收器)
此时,伺服系统应该已经安装到前臂中。要将它们连接到电源和 Arduino,您可以使用小面包板。
请记住将面包板上的负极连接到 Arduino 的 GND。电路中的所有 GND 都需要连接才能工作。
我推荐使用 nRF24L01+ 模块的电源适配器。否则,可能会因电流不足而导致通讯中断。
如果您遇到以下问题:伺服电机振动、伺服电机不工作、通信故障等类似情况,请为您的 Arduino 板提供外部电源(如 USB)。
伺服电机的连接:
- Servo-1 连接到 Arduino 的模拟 01 (A1)。
- Servo-2 连接到 Arduino 的模拟 02 (A2)。
- Servo-3 连接到 Arduino 的模拟 03 (A3)。
- Servo-4 连接到 Arduino 的模拟 04 (A4)。
- Servo-5 连接到 Arduino 的模拟 05 (A5)。
nRF24L01 模块的连接:
- VCC 连接到 Arduino 的 +5V。
- GND 连接到 Arduino 的 GND。
- CE 连接到 Arduino 的数字 9 引脚。
- CSN 连接到 Arduino 的数字 10 引脚。
- SCK 连接到 Arduino 的数字 13 引脚。
- MOSI 连接到 Arduino 的数字 11 引脚。
- MISO 连接到 Arduino 的数字 12 引脚。
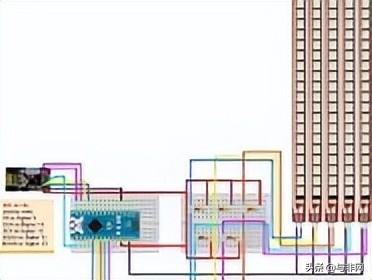
手套的连接(发射器)
柔性传感器需要一个电路才能与 Arduino 兼容。Flex 传感器是可变电阻器,因此我建议使用分压器。我用了10K电阻。
- 连接到传感器的所有单独 GND 线的主 GND(地)线连接到 Arduino 的 GND。来自 Arduino 的 +5 V 连接到主正电压线。每个柔性传感器的导线通过分压器连接到单独的模拟输入引脚。
- 我将电路焊接到一个小 PCB 上,可以很容易地安装在手套上。您可以在小面包板上而不是 PCB 上构建电路。
- 手套的电路可以使用 9V 电池。
如果您使用的引脚与下面显示的引脚不同,请在代码中更改它们。
弯曲传感器的连接:
- Flex-1 连接到 Arduino 的模拟 01 (A1)。
- Flex-2 连接到 Arduino 的模拟 02 (A2)。
- Flex-3 连接到 Arduino 的模拟 03 (A3)。
- Flex-4 连接到 Arduino 的模拟 04 (A4)。
- Flex-5 连接到 Arduino 的模拟 05 (A5)。
项目源代码
要使源代码正常工作,请遵循以下建议:
- 下载 RF24.h 库并将其移动到 Arduino 库文件夹。https://github.com/maniacbug/RF24
- 将弯曲传感器连接到手套后,读取并记下每个弯曲传感器检测到的最小值和最大值。
- 然后将这些值输入到发射器(手套)代码中。
- 在将伺服皮带轮连接到伺服电机之前,请将所有伺服电机保持在 10 或 170 度。
- 安装伺服滑轮时,将手指保持在关闭或打开位置(根据您的伺服位置)。
- 然后缠绕伺服滑轮,直到编织线被拉伸。
- 通过一一检查伺服电机,将所有手指移动到关闭和打开位置。
- 然后获得伺服电机的最佳角度(手指闭合和打开时的伺服角度)。
- 将伺服电机角度和弯曲传感器值输入到变送器代码中,如下所示。
- 接收器源代码只有一处变化。发射器中的哪个弯曲传感器将控制接收器中的哪个伺服电机?例如,msg[0] 发送 x sensor-5 的数据。如果您想使用 flex sensor-5 控制伺服电机 5,您可以通过键入“ servo-5.write(msg[0]) ”来实现。
- 如果您使用的引脚与电路中显示的引脚不同,请在两个代码中更改它们。



更多详情资料可前往基于 Arduino 的无线手势控制机械手臂(接线图+代码) – 电路城
此方案版权归电路城用户所有,如作者不愿发布在头条可私信或前往电路城联系相关人员删除。


如若转载,请注明出处:https://www.daxuejiayuan.com/5244.html
相关推荐
-
免费直播系统源码(直播系统源码 云暴科技)
互联网平台发展至今,直播平台的火爆相信大家是有目共睹的,而内容质量也成为了他们评判好坏的标准,现在越来越多的企业选择投资直播这个行业,但目前这个市场的状态是僧多粥少,很多投资者投资…
-
s365国网公司健步走app最新软件(最新软件发布平台)
哈喽大家好,我是分享科技小达人。 我发现大家日常最多使用电子产品还是手机,今天给大家分享五款手机上的实用APP,都是高质量无广告的,一起来看看吧~ ?01. 慢读 这是一款专注于手…
-
高端大气网站(最新_高端大气)
在建立一个高端网站时,一个成功的网站会给网站访问者一个很好的视觉体验,不仅会让目标受众群体想要重新访问,因此建设一个高端网站是很重要的。以下是一些可以帮助公司成功建立高端网站的方式…
-
海岛奇兵qq版本下载(我的世界qq版本下载)
《管子 乘马》言:“是故事者生于虑,成于务,失于傲。不虑则不生,不务则不成,不傲则不失。”在基层工作中,对这句话的感悟尤为深刻。基层工作并非一片坦途,更要坚定一往无前、永不止步、戒…
-
物流管理模拟考核系统(医师定期考核系统)
本文首先介绍SaaS产品通用选型概览,再介绍无代码开发平台选型指南。 目录 一、如何选购SaaS 二、无代码开发平台概览 1、无代码开发平台是什么? 2、无代码开发平台使用场景有哪…
-
传奇无忧客户端(无忧传奇不花钱怎么玩)
其实集团高层的老总们也越来越意识到,企业的精细化管理势在必行了,特别是成本管控方面必须越来越规范,即便是财务状况良好的优质企业,哪怕是发展势头顺风顺水的风口时期。也是偶然的机会,一…
-
通讯录管理软件哪个好(通讯录管理软件知乎安卓)
北明数科统一用户中心简介 北明数科统一用户中心构建个人用户信息资源库,采用大数据和人工智能技术,在权限和政策允许的范围内全触点数据采集、多源数据打通;全渠道用户触达,构建全局统一的…
-
08影院(新车 _ 冒险式创新!第七代宝马7系正式发布,后排堪比移动影院)
文:懂车帝原创 陈旭明 车头的全新造型风格相比前代车型拥有革新级别的变化 分体式头灯成为宝马家族全新设计风格,与新款宝马X7步调一致 分体式头灯组也是新车的一大看点,其中上方的两段…
-
电影网推荐豆瓣(电影网推荐天机)
《父与女》 9.2评分 《我不是药神》 9.0评分 《阿甘正传》 9.5评分 《放牛班的春天》9.3评分 《楚门的世界》 9.3评分 《教父》 9.3评分 《千与千寻》 9.4评分…
-
忧码商城下载(忧码商城开发)
昨天发布的一篇文章《奇葩的一场相亲》,这是根据身边的一个人的相亲经历更改的,截止目前展现量有102737,阅读量有5282,点赞量有37,转发量有1,收藏量有7,承蒙头条君宠爱,昨…