
在这个项目中;提供 3D 机械手组装、伺服控制、柔性传感器控制、使用 nRF24L01 进行无线控制、Arduino 接收器和发射器源代码。简而言之,在这个项目中,我们将学习如何用无线手套控制机械手。
手和前臂的 3D 模型
这只手是一个名为 InMoov 的开源项目的一部分。这是一个可 3D 打印的机器人,这只是手和前臂的组装。
零件组装
机械臂零件的组装非常详细和复杂,因此您可以访问 InMoov 网站的“组装草图”和“组装帮助”页面,了解更多组装细节。
组装手指时,在粘合之前确保零件的方向正确。在将伺服皮带轮连接到伺服电机之前,请将所有伺服电机保持在 10 或 170 度。安装伺服滑轮时,将手指保持在关闭或打开位置(根据您的伺服角度)。然后缠绕伺服滑轮,直到编织线或绳子被拉伸。
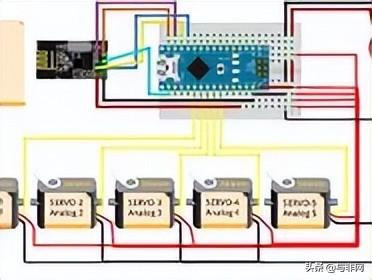
手的连接(接收器)
此时,伺服系统应该已经安装到前臂中。要将它们连接到电源和 Arduino,您可以使用小面包板。
请记住将面包板上的负极连接到 Arduino 的 GND。电路中的所有 GND 都需要连接才能工作。
我推荐使用 nRF24L01+ 模块的电源适配器。否则,可能会因电流不足而导致通讯中断。
如果您遇到以下问题:伺服电机振动、伺服电机不工作、通信故障等类似情况,请为您的 Arduino 板提供外部电源(如 USB)。
伺服电机的连接:
- Servo-1 连接到 Arduino 的模拟 01 (A1)。
- Servo-2 连接到 Arduino 的模拟 02 (A2)。
- Servo-3 连接到 Arduino 的模拟 03 (A3)。
- Servo-4 连接到 Arduino 的模拟 04 (A4)。
- Servo-5 连接到 Arduino 的模拟 05 (A5)。
nRF24L01 模块的连接:
- VCC 连接到 Arduino 的 +5V。
- GND 连接到 Arduino 的 GND。
- CE 连接到 Arduino 的数字 9 引脚。
- CSN 连接到 Arduino 的数字 10 引脚。
- SCK 连接到 Arduino 的数字 13 引脚。
- MOSI 连接到 Arduino 的数字 11 引脚。
- MISO 连接到 Arduino 的数字 12 引脚。
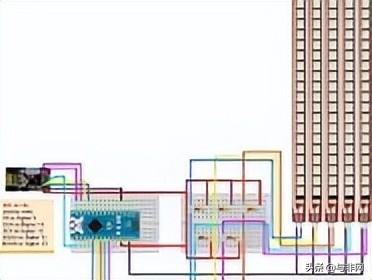
手套的连接(发射器)
柔性传感器需要一个电路才能与 Arduino 兼容。Flex 传感器是可变电阻器,因此我建议使用分压器。我用了10K电阻。
- 连接到传感器的所有单独 GND 线的主 GND(地)线连接到 Arduino 的 GND。来自 Arduino 的 +5 V 连接到主正电压线。每个柔性传感器的导线通过分压器连接到单独的模拟输入引脚。
- 我将电路焊接到一个小 PCB 上,可以很容易地安装在手套上。您可以在小面包板上而不是 PCB 上构建电路。
- 手套的电路可以使用 9V 电池。
如果您使用的引脚与下面显示的引脚不同,请在代码中更改它们。
弯曲传感器的连接:
- Flex-1 连接到 Arduino 的模拟 01 (A1)。
- Flex-2 连接到 Arduino 的模拟 02 (A2)。
- Flex-3 连接到 Arduino 的模拟 03 (A3)。
- Flex-4 连接到 Arduino 的模拟 04 (A4)。
- Flex-5 连接到 Arduino 的模拟 05 (A5)。
项目源代码
要使源代码正常工作,请遵循以下建议:
- 下载 RF24.h 库并将其移动到 Arduino 库文件夹。https://github.com/maniacbug/RF24
- 将弯曲传感器连接到手套后,读取并记下每个弯曲传感器检测到的最小值和最大值。
- 然后将这些值输入到发射器(手套)代码中。
- 在将伺服皮带轮连接到伺服电机之前,请将所有伺服电机保持在 10 或 170 度。
- 安装伺服滑轮时,将手指保持在关闭或打开位置(根据您的伺服位置)。
- 然后缠绕伺服滑轮,直到编织线被拉伸。
- 通过一一检查伺服电机,将所有手指移动到关闭和打开位置。
- 然后获得伺服电机的最佳角度(手指闭合和打开时的伺服角度)。
- 将伺服电机角度和弯曲传感器值输入到变送器代码中,如下所示。
- 接收器源代码只有一处变化。发射器中的哪个弯曲传感器将控制接收器中的哪个伺服电机?例如,msg[0] 发送 x sensor-5 的数据。如果您想使用 flex sensor-5 控制伺服电机 5,您可以通过键入“ servo-5.write(msg[0]) ”来实现。
- 如果您使用的引脚与电路中显示的引脚不同,请在两个代码中更改它们。



更多详情资料可前往基于 Arduino 的无线手势控制机械手臂(接线图+代码) – 电路城
此方案版权归电路城用户所有,如作者不愿发布在头条可私信或前往电路城联系相关人员删除。


如若转载,请注明出处:https://www.daxuejiayuan.com/5244.html
相关推荐
-
e酷配(e酷派)
4月26日,广汽传祺EMKOO影酷正式发布,该车是基于EMKOO概念车打造而来,提供三种动力版本,定位紧凑型SUV,也是影系列的首款SUV车型,主打年轻用户市场,年内正式上市。在影…
-
天涯易读邀请码(天涯易读手机版)
国庆过后,早琢磨着要码点文字了,写写老家那滩南门坑,写写火车站里给小孩喂奶的那位母亲。只可惜情绪一直飘忽不定。作罢作罢!还是乱谈一通好一点,想到哪写到哪。 前段时间忙着考试,从笔试…
-
dedecms模板 如何设置图片宽度自动变小(dedecms模板转易优)
在实际工作中,最常用的文档模板往往是公司或部门自定义的模板。但就文档模板的推送方式而言,像 Office 在线模板那样直接推入 Office 客户端的体验可谓最佳。 实际上,Mic…
-
微商城多用户版(微商城多店铺)
对一些刚刚加入电商行业的商家来说,做好微商城无疑是一个巨大的挑战,这类商家要明白一个道理,提高知名度是微商城成功的前提,今天小编就来分享一下提高知名度的一些方法,希望对大家有所帮助…
-
wampserver红色如何变成绿色(wampserver安装教程)
用蚂蚁啃大象的办法学编程 先说一下编程的好处 一.程序员的收入,月均收入2万以上,14亿人口中,稳居白领一族。 二.程序员在家一边带小孩 ,一边煮饭,一边赚钱养老婆,老婆特别放心,…
-
小区物业管理系统er图(小区物业管理系统答辩问题)
随着我国房地产业的飞速发展,与之相伴的物业收费系统也发展起来了。因为一个楼盘是否受欢迎?是否有档次?都与物业是否有完善的物业管理系统有关系。这里所说的物业管理系统不局限于民用住宅,…
-
图书管理软件下载(图书馆管理系统软件下载)
沙牛提示阅读本文需要 4 分钟,安利一款性价比最高的阅读管理神器! 如果你喜欢本文,就分享给你的小伙伴! 01 前言在之前的文章中,我曾安利了几款近期高频次使用的 app,其中,包…
-
有没有免费的聊天室(免费聊天室哪个好)
您是否还在因疫情影响无法线下求助专家所困扰?是否还在为找不到精准匹配的专家而烦恼?是否还在因无法全面查询法律法规条文所头疼? 众志成城抗疫情,不要担心!您的需求就是我们的担当!51…
-
网页推广(网页推广链接怎么做)
信息网站是指基于文章的网站,是互联网网站最基本的形式之一,也是Web1.0的基本表现形式。许多组织或公司从信息站开始。新浪是互联网上最具代表性的信息站。最早的新浪只关注一件事,就是…
-
学生成绩管理系统答辩ppt(学生成绩管理系统设计报告)
Excel制作一个成绩管理系统,本系统将是一个全功能性的学生成绩管理应用,可以根据不同班、考场、学号等关键字段进行学生成绩的添加、修改、删除、统计、打印等功能。 同时将在完整地应用…